
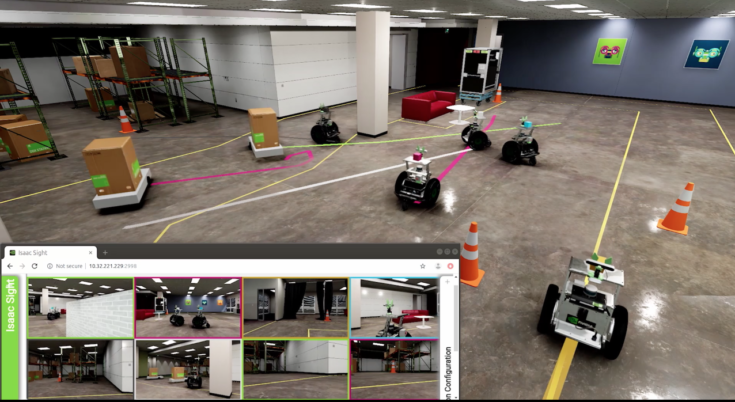
NVIDIAは、ロボティクス開発用のシミュレーション環境を作り、AIの認識やセンサーの反応、ロボットの動きなどを仮想空間の中で総合的に確認できる「Isaac」(アイザック)において、新バージョンのNVIDIA Isaacソフトウェア開発キット(SDK)がリリースされたことを発表した。(上の画像はIsaac Sim環境(左:仮想環境)と実際の環境(右))
Isaac SDKとは
NVIDIA Isaacソフトウェア開発キット(SDK)は、AI、シミュレーション、ナビゲーション、操作を備えた、統合型ロボットAI開発プラットフォームだ。新しいIsaac SDKは、研究者、開発者、スタートアップ、製造業者向けのロボットの開発とテストを大幅に加速できる。また、AIを使用したシミュレーションによるロボットの認識とトレーニングが可能になり、さまざまな環境や状況でテストおよび検証が行える。
AIロボット開発を促進するために、Isaac SDKには、カメラベースのさまざまな知覚ディープニューラルネットワークが含まれている。
・オブジェクト検出: ナビゲーション、相互作用、または操作のためにオブジェクトを認識する
・自由空間セグメンテーション: 歩道の場所やロボットの移動が許可されている場所の判別など、外界を検出してセグメント化
・3D姿勢推定: オブジェクトの位置と方向を理解し、ロボットアームがオブジェクトを拾うようなタスクを可能にする
・2D人間の姿勢推定: 姿勢推定を人間に適用する。これは、配達ボットなどの人間と対話するロボットや、人間と一緒に動作するように特別に設計されたコボットにとって重要となる。
このSDKの物体検知は、ResNetディープニューラルネットワークとともに最新のレベルに保たれ、NVIDIAのTransfer Learning Toolkitを使ってトレーニングできる。これにより、検知対象に物体を新たに追加して、新しいモデルをトレーニングすることが容易になり、高いレベルの精度で物体検知が実行できる。
新機能 3Dワールドシミュレータ「Isaac Sim」
Isaac Sim(シミュレーションプラットフォーム)は、ドメインランダム化(シーンパラメーター制御)やシナリオ管理(さまざまなシナリオでのロボットの迅速なテスト)などの機能がある仮想ロボットラボ「3D環境でのシミュレータ」。

合成データによるトレーニングが可能
各種センサーをシュミレーション
ロボットは、RGBカメラ、ステレオマイク、深度、LIDAR、IMU等の仮想センサーでシミュレートできる。シミュレーションによって、いわゆる「コーナー ケース」 (めったに発生しない困難な条件)でのテストが可能になり、トレーニングを一層強化できる。それらの結果をトレーニング パイプラインに取り込むことで、実データとシミュレーション データの両方を使ってニューラルネットワークの精度を向上させることが可能になる。

シュミレーション

実世界
マルチロボットに対応
また、SDKではマルチロボットシミュレーションも提供される。これにより、開発者はテストのために複数のロボットをシミュレーション環境に配置できるため、相互に関連して動作する環境を学習できる。
個々のロボットは、共有仮想環境内を移動しながら、Isaacのナビゲーションソフトウェアスタックの独立したバージョンを実行できる。したがって、大規模な物流業務で複数のロボットを実行しようとするメーカーは、たとえば、現実世界に展開する前に相互作用をテストし、問題をデバッグすることができる。
IsaacはDeepStreamと統合可能
新しいSDKには、分析機能の処理に幅広く利用されているNVIDIA DeepStreamソフトウェアのサポートも組み込まれている。ロボティクスアプリケーションをサポートするエッジのAIにDeepStreamとNVIDIA GPUを展開することで、ビデオストリームを処理できる。開発者は、車載用途でも遠隔地でも、カメラからのビデオフィードの分析を必要とする幅広いロボットが開発できるようになる。
C言語ベース APIのアクセスに対応
最後に、独自のコードを開発するロボット開発者のために、新しいSDKは新たに追加されたC言語ベースの新しいAPIとそのコードを統合できるよう設計されている。これにより開発者は、独自のソフトウェアスタックを Isaac SDKに接続してプログラミング言語の変換を最小限に抑え、ユーザーにC言語ベース APIのアクセスを通じてIsaacの機能を提供できる。追加されたC言語ベース APIのアクセスによって、他のプログラミング言語でのIsaac SDK利用も可能にる。
"シミュレーション" - Google ニュース
December 25, 2019 at 02:03PM
https://ift.tt/39dlphQ
NVIDIAがロボット開発向け3D環境シミュレータ「Isaac Sim」をリリース ロボットの動き、AI認識、センサーなどを仮想空間でテスト - ロボスタ
"シミュレーション" - Google ニュース
https://ift.tt/2Y8i6U2
Shoes Man Tutorial
Pos News Update
Meme Update
Korean Entertainment News
Japan News Update
Bagikan Berita Ini














Related Posts :
 ホンダF1、ロシアGPで新PU…トラブル完全解決か「シミュレーションで再現」とフェルスタッペン - Formula1-Data
ホンダF1、ロシアGPで新PU…トラブル完全解決か「シミュレーションで再現」とフェルスタッペン - Formula1-Data- 水害の被害軽減に、浸水リスクのシミュレーションを。浸水ナビ(地点別浸水シミュレーション検索システム) - LIFULL HOME'S(ライフルホームズ)
- 毎日使うものだからこそ。知ってほしい Dynabookの品質へのこだわり - PR TIMES
- 理経が提供するモーションポートレート社「ARメイクシミュレーション」を株式会社ファンケルが採用 実店舗にてサービス開始 - PR TIMES
- 紫外線照射殺菌/ウイルス不活化の最適なプロセスをシミュレーションで予測可能に!照明・流体解析技術によるウイルス対策・殺菌装置開発支援のお知らせ - PR TIMES
0 Response to "NVIDIAがロボット開発向け3D環境シミュレータ「Isaac Sim」をリリース ロボットの動き、AI認識、センサーなどを仮想空間でテスト - ロボスタ"
Post a Comment